Jingwen Wang
Personal Page: jingwenwang95.github.io, Github: JingwenWang95, Email: Jingwen.Wang.17@ucl.ac.uk, Phone: +44 7999699626
My current research is focused on object level semantic SLAM, combining object-level scene understanding and SLAM systems using learning-based approaches. I proposed and implemented DSP-SLAM, an object SLAM system capable of building rich and accurate joint map of dense objects and sparse background points using pre-trained shape prior. I'm also interested in 3D reconstruction, localization, neural scene representations and semantic mapping.
Education
| 10/2019 - Now |
PhD student in 3D Computer Vision (University College London) Supervised by Prof. Lourdes Agapito and Prof. Niloy Mitra, working on 3D Vision and SLAM |
| 10/2017 - 09/2018 |
Master's degree in Robotics (University College London) Courses include robotics fundamentals, machine learning, machine vision and robot navigation Thesis: "A Study of Combining Robot Kinematics and Visual SLAM using a Robot Arm and Hand-mounted Camera" Distinction (courses: 82.2, thesis: 78) |
| 09/2013 - 06/2017 |
Bachelors degree in Electrical Engineering (University of Liverpool) Thesis: "Development of a WiFi Policer System" supervised by Prof. Alan Marshall. First Class Honors (All First, Year 1: 79.2, Year 2: 89.3, Year 3: 79.2) |
Publications
 |
MorpheuS: Neural Dynamic 360° Surface Reconstruction from Monocular RGB-D Video
Hengyi Wang, Jingwen Wang, Lourdes Agapito CVPR 2024 (Conference) Project Page | Paper | Video | BibTeX |
 |
SeMLaPS: Real-time Semantic Mapping with Latent Prior Networks and Quasi-Planar Segmentation
Jingwen Wang, Juan Tarrio, Lourdes Agapito, Pablo F. Alcantarilla, Alexander Vakhitov RA-L 2023 and ICRA 2024 Project Page | Paper | Video | BibTeX |
 |
Co-SLAM: Joint Coordinate and Sparse Parametric Encodings for Neural Real-Time SLAM
Hengyi Wang*, Jingwen Wang* and Lourdes Agapito (* Equal contribution) CVPR 2023 (Conference) Project Page | Paper | Video | BibTeX |
 |
GO-Surf: Neural Feature Grid Optimization for Fast, High-Fidelity RGB-D Surface Reconstruction
Jingwen Wang*, Tymoteusz Bleja* and Lourdes Agapito (* Equal contribution) 3DV 2022, Oral (Conference) Project Page | Paper | Video | BibTeX |
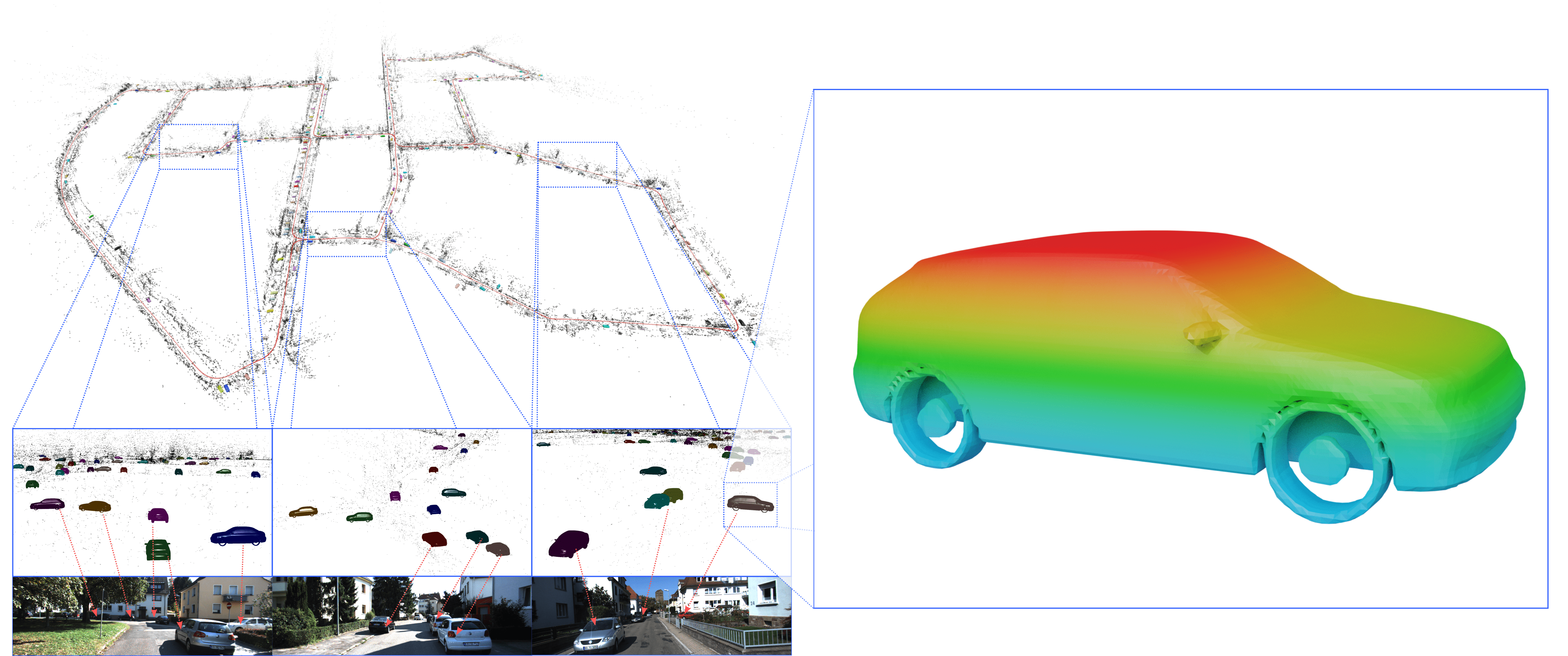 |
DSP-SLAM: Object Oriented SLAM with Deep Shape Priors Jingwen Wang, Martin Rünz and Lourdes Agapito 3DV 2021 (Conference) Project Page | Paper | Video | BibTeX |
Other Projects
 |
Python Implementation of KinectFusion with PyTorch (2022) Re-implemented the KinectFusion algorithm with Python and PyTorch. All the core functions (TSDF volume, frame-to-model tracking, point-to-plane ICP, raycasting, TSDF fusion, etc.) are implemented using pure PyTorch without any custom CUDA kernels. The system is able to run at 17Hz with a single RTX2080 GPU. Code available on GitHub. |
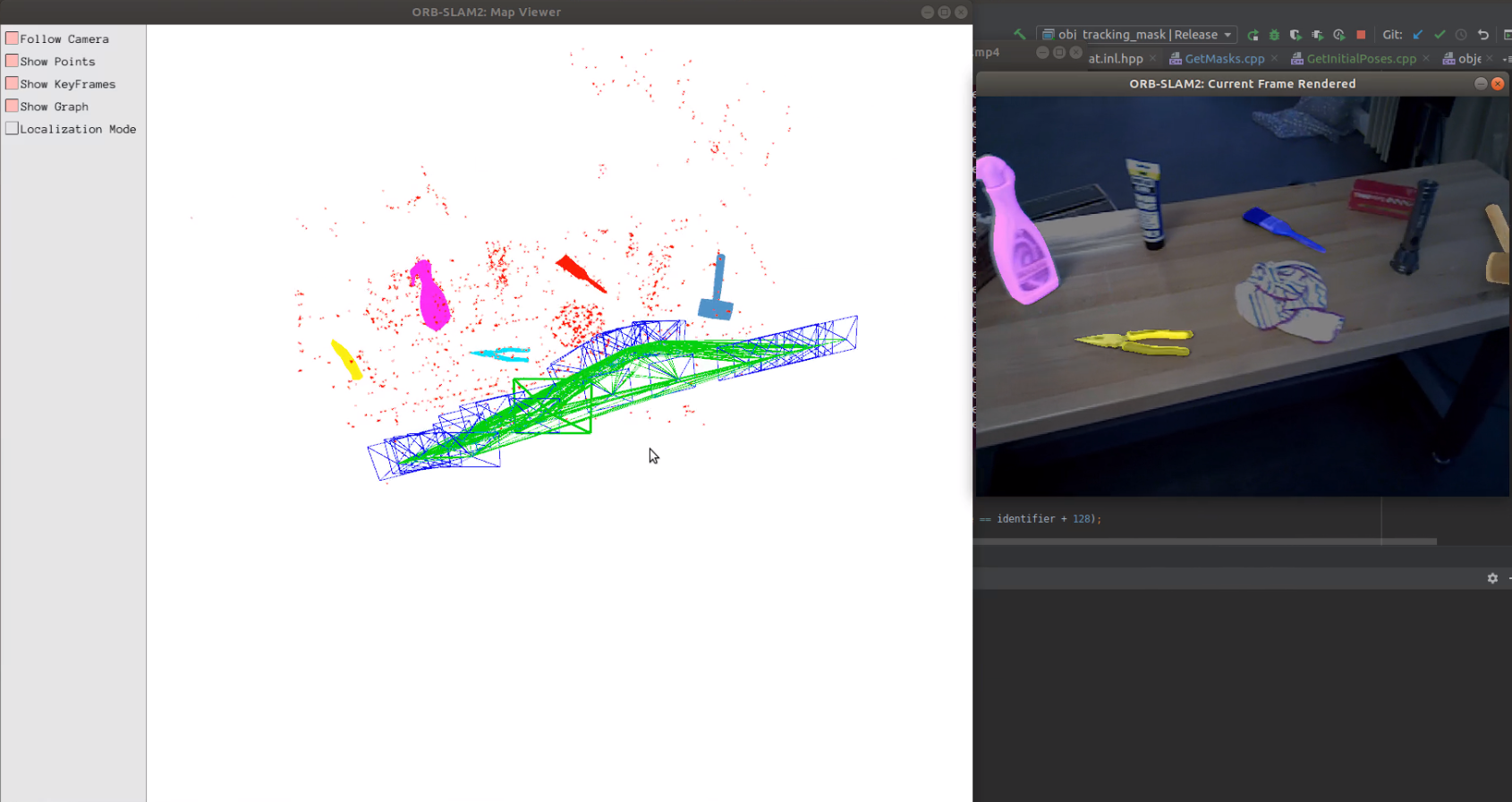 |
Object Tracking and Mapping with an RGB-D Camera (2020) Part of EU Horizon 2020 Secondhands Project. Built a SLAM system that is able to track 6-DoF poses of several objects with known 3D shapes using ICP with an RGB-D camera and reduced the tracking uncertainty by involving object poses in the joint factor-graph and iteratively optimizing object poses. Supervisor: Prof. Lourdes Agapito |
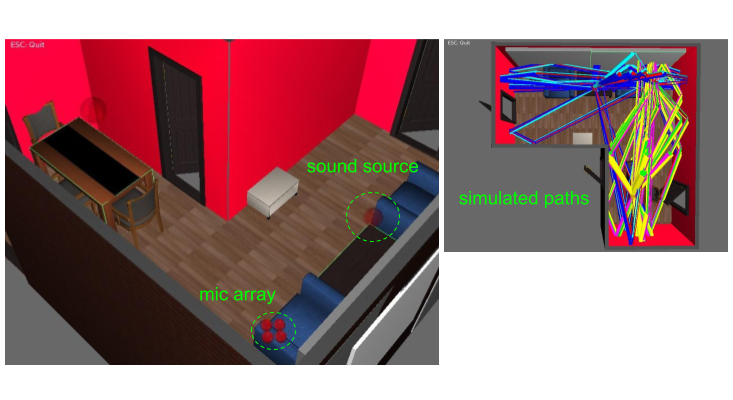 |
Towards Realistic Data Augmentation for DOA estimation (2018) Work done during an internship at Emotech. Developed a data-driven sound source Direction-of-Arrival (DOA) estimation algorithm using CNNs, and performed more realistic data augmentation using HoME-platform. Supervisor: Dr. Pawel Swietojanski |
Experience
| 07/2022 - Now London |
SLAMcore, Research Intern. Working on a project focusing on differentiable map representation for online semantic and panoptic reconstruction. |
| 10/2018 - 02/2019 London |
Emotech LTD, Research Intern. Worked on a project focusing on improving sound source localization and beam-forming using Deep Learning and multi-modal input data. |
Teaching
| University College London | COMP0026 Image Processing TA - Fall 2019, Fall 2021 COMP0130 Robot Vision and Navigation TA - Spring 2020, Spring 2021 |
Technical Skills
| Programming | Python*, C/C++*, HTML/CSS |
| Software/Framework | PyTorch*, TensorFlow, OpenCV*, Open3D*, PyTorch3D*, g2o, Matlab* |
| (*) implies a sufficent level of expertise |
Honors and Awards
| 09/2019 | UCL Foundational AI CDT Scholarship awarded by UCL Computer Science and EPSRC |
| 09/2015 & 09/2016 | University Scholarship (half-tuition exemption) awarded by the University of Liverpool for top students (50/2200+) |